
AI 모델 최적화 기업 노타가 퀄컴의 최신 엣지 AI 플랫폼에서 피지컬 AI 모델의 실시간 처리 성능을 대폭 끌어올렸다. 클라우드를 거치지 않고 로봇 내부에서 연산을 처리하는 온디바이스 AI의 실용성을 증명한 결과다.
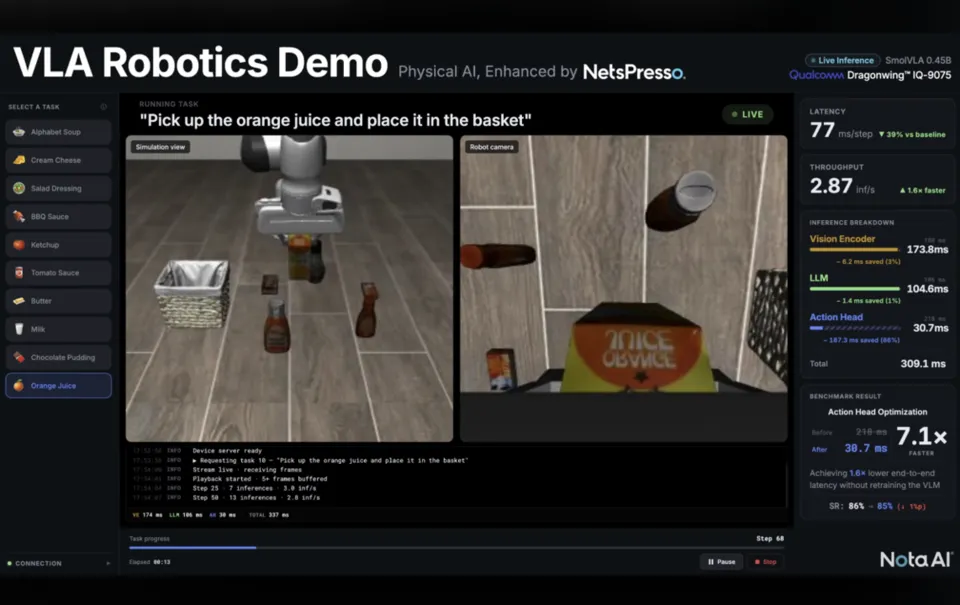
이번 최적화 작업은 퀄컴의 드래곤윙(Dragonwing) IQ-9075 환경에서 진행됐다. 노타는 시각 정보와 언어, 로봇의 움직임을 제어하는 비전·언어·행동(VLA) 모델을 엣지 기기에 맞춰 다듬었다. 그 결과 로봇이 명령을 이해하고 다음 행동을 만드는 단계의 처리 시간이 기존 218ms에서 31ms로 단축됐다. 약 7배 빨라진 속도다.
반응 속도가 빨라지면서 전체 추론 시간도 505ms에서 310ms 수준으로 줄었다. 로봇 제어에서 연산 속도가 늦어지면 움직임이 끊기거나 돌발 상황 대처가 늦어지는데, 이 병목 현상을 해결한 셈이다. 데이터 크기를 줄이는 최적화 과정을 거쳤음에도 작업 성공률은 기존과 다름없는 85% 선을 유지했다.
그동안 제조나 물류 현장에서 고성능 로봇을 굴리려면 외부 클라우드 GPU 서버와 연동해야 했다. 통신 지연이나 네트워크 비용 부담이 뒤따랐다. 연산 인프라를 로봇에 내장하는 방식을 쓰면 현장 인터넷이 끊겨도 로봇이 멈추지 않고 작동할 수 있다. 데이터 유출 위험이 민감한 보안 공장에서도 도입 장벽이 낮아진다.
채명성 노타 대표이사는 "이번 실증은 엣지 환경에서도 대형 VLA 모델을 실시간으로 구동할 수 있다는 가능성을 보여준 사례"라며 "지연시간에 민감한 제조와 물류 등 실제 산업 현장에 피지컬 AI 로봇을 빠르게 보급하는 계기가 될 것"이라고 말했다.










